欢迎您来到爱游戏体育网页登录官网入口



发布时间: 2024-07-30 12:04:18 | 作者: 爱游戏体育官网网页
:电子电路应用中,用风冷散热已经没办法满足快速降温的要求,解决大功率元器件的降温问题已很重要。因此,利用液冷作为散热平台对大功率元器件进行散热的控制管理系统将得到普遍应用。本文采用8位的STC15W408AS系列国产单片机微控制器做为控制芯片,以反电势法驱动无位置传感器无刷水泵[1],以国产32位ARM核MCU,GD32F450为核心,实现液冷系统中对水泵控制、风机控制、温度采集、液位监控、信息传递等液冷散热平台的智能控制。
摘要:该智能液冷控制管理系统软硬件采用模块化设计,结构相对比较简单、抗干扰能力强、工作稳定、成本较低、控制灵活、实用性强,可大范围的应用于大功率元器件的散热。
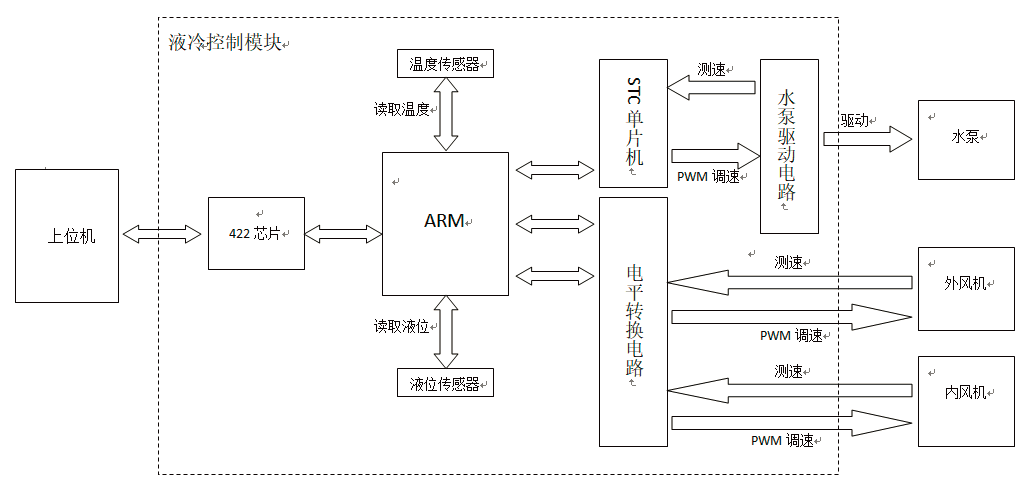
液冷系统的控制是一个非常典型的机电一体控制管理系统。它不仅需要水泵、风机作为执行元件,更需要MCU的控制单元。随着电子技术和无刷电机控制理论发展的成熟,无位置无刷直流电机的应用得到普及,它具有体积小、结构相对比较简单、适应恶劣环境、维护方便、便于智能控制等系列优点,在水泵领域得到普遍的应用。液冷智能系统控制采用国产32位ARM核MCU,以GD32F450为核心读取液冷温度,根据温度的变化为依据,水泵流量、风机转速,通过串口传送液冷数据,如水泵转速、风机转速、液冷温度、液冷液位高度等,实现液冷智能自动控制,如图1 所示。
本设计的水泵使用无位置无刷水泵,驱动控制采用8 位的STC系列国产单片机为核心,利用反电势法设计了一种无位置传感器无刷水泵驱动控制器。利用MOSFET 作为开关器件,给出了全桥式逆变电路和位置检测电路的原理图。
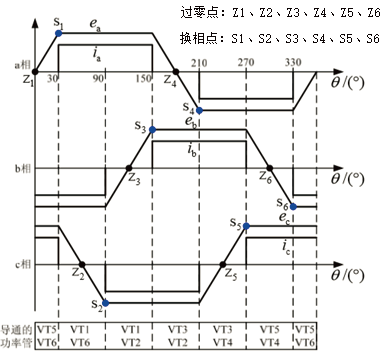
无位置传感器无刷直流电机是如何驱动与控制的呢?通常,无刷电机都要使用位置传感器来检测无刷电机转子的位置来进行驱动和控制,但位置传感器有一些缺点,比如:增加成本、增加无刷电机体积、易出故障、易遭受干扰、不能适应恶劣环境等。因此,反电势法孕育而生,其优点是:降低无刷电机成本、减少无刷电机体积、减少故障、适应恶劣环境、可靠性提高等。反电势法的工作原理是通过检验测试无刷电机的不导通绕组的反电动势来找到反电动势的过零点,再延迟30° 电角度进行换相。如图2 所示,A 相绕组的反电势在一个电周期内的波形,其中横轴代表当前运行时刻的电角度,纵轴代表A 相绕组产生的反电势Ea。从图中能够准确的看出,当检测到反电势信号过零点Z4 后,再延迟30° 电角度即是换相点[1]。对于三相绕组电机,每隔60° 电角度就会产生一个反电势过零点,过零点信号被STC15W408AS微控制器检测并处理。
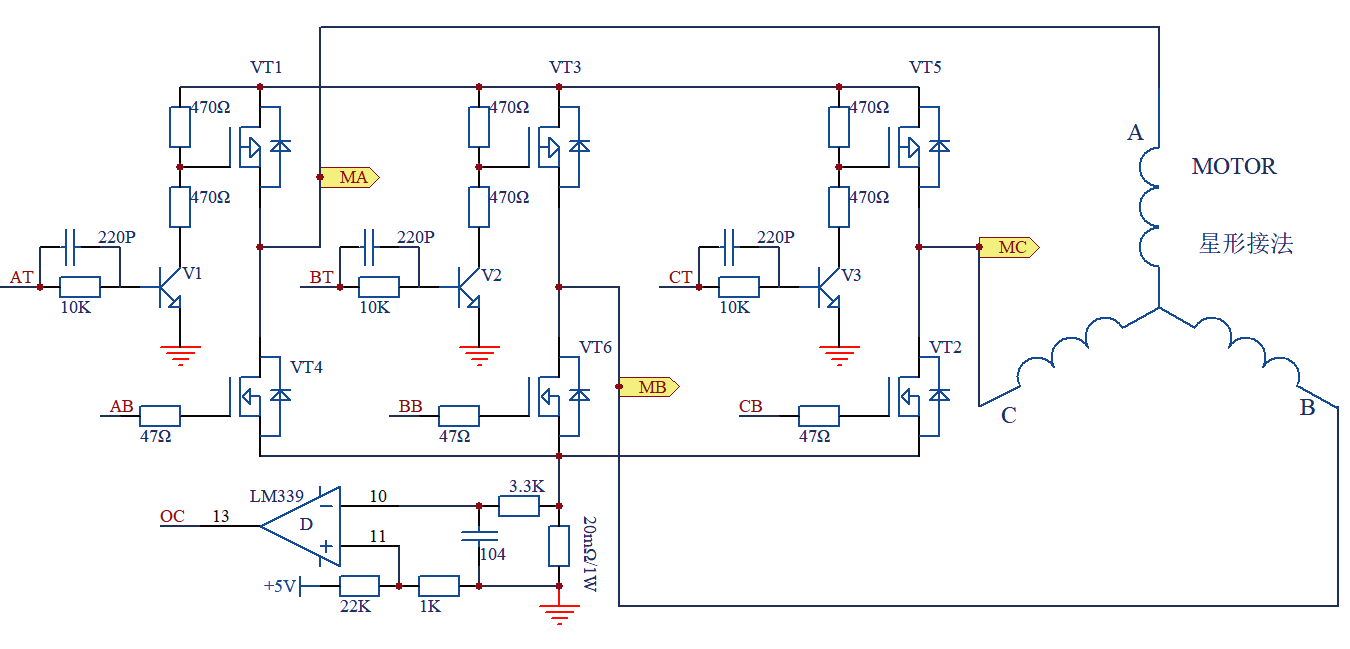
在本电路的驱动电路设计中,电路上桥臂采用MOSFET P管,下桥臂使用MOSFET N管,与电机绕组连接电路简单。此电路的设计采用了MOSFET P管和MOSFET N管,简化了电路,节省了电压泵即自举电路,降低了成本,缩小了空间,提高了可靠性[4],如图3。
在电路的设计中采用8位的STC15W408AS 系列国产单片机为核心,检测反电势过零信号判断转子位置,对无刷电机驱动电路进行相对有效地控制,电路原理图如图4。
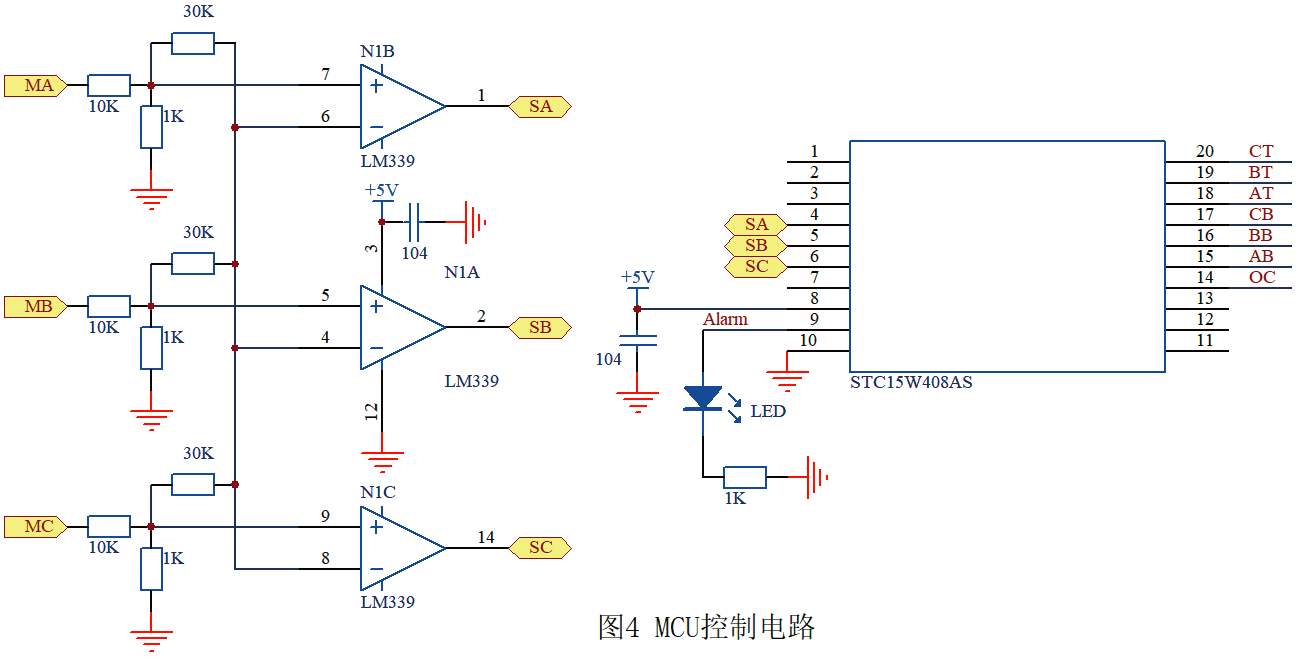
反电动势信号经过由比较器LM339组成的检测电路,检测出反电动势过零信号给单片机STC15W408AS, 提供无刷直流电机水泵的转子位置信号,以此来实现控制无位置传感器无刷直流电机水泵的驱动电路进行正确地换相,驱动无位置传感器无刷直流电机水泵正常运转。
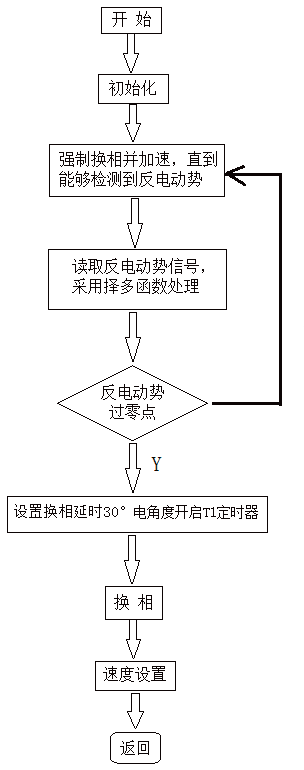
水泵的系统主程序流程如图5 所示。水泵在停止的时候,无刷电机的转子处于位置不确定的停止状态,此时检测不到反电势信号,因此就需要先确定转子的位置,让转子先转起来;采用开环强制换相并加速直到可以检测到反电动势的时候再读取反电动势信号,采用择多函数处理,防止干扰信号[6]。在读取到反电动势过零点后计算换相延时30°电角度,利用定时器延时,延时到30°电角度后换相进入新的循环过程。在正常运行的同时接收ARM核MCU的调速控制信息。
液冷系统在运行的过程中由国产32 位ARM 核MCUGD32F450为核心读取液冷温度,根据温度的变化调节水泵流量、风机转速,通过串口传送液冷数据,如水泵转速、风机转速、液冷温度、液冷液位高度等,实现液冷智能自动控制。
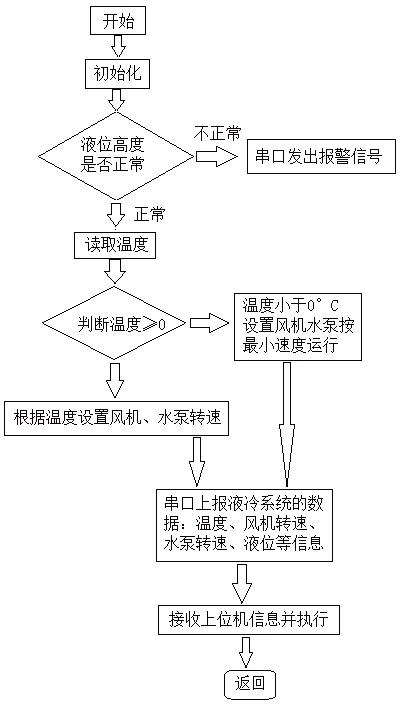
软件设计主控制程序流程图如图6 所示,首先进行初始化程序,初始化程序设计主要是完成GD32F450的GPIO配置、定时器配置、串口设置、PWM设置、QT18B20温度读取设置、中断服务配置等。系统的重要功能是通过GD32F450读取温度、设置风机PWM、设置水泵转速,上报系统温度、风机转速、水泵转速、液位等信息,实现系统智能的控制。
在图7 中显示了8 个加热模块的温度,每个模块450 W的热耗功率,一共为3 650 W的热耗功率,8 个发热模块均匀分布在41 mm×340mm的冷板上。在环境和温度为17 ℃的情况下,开启液冷系统,热耗功率3 650W,通过液冷系统的冷板吸收热量,再通过换热器释放热量。冷板里的乙二醇溶液由水泵打入,再流到换热器里经过换热器由风机把热量释放开来。测试根据结果得出,发热功率在3 650W、环境和温度17℃ 的情况下,热平衡时的温升是28℃。根据结果得出液冷智能控制管理系统满足了液冷的散热要求,表1中为测试结果。
结论:本实验中热耗功率加至3 650 W 时,最高温升至28 ℃ 左右,从实验结果来看,能够很好的满足(具体发热量3 650 W)3 kw 功放单元满功率负荷30 分钟以上情况,功放模块的温升控制在35 ℃ 以下”。
本文的无位置传感器无刷直流电机水泵以8位的STC15W408AS 系列国产单片机为核心,实现了无位置传感器无刷直流电机控制,采用择多函数滤波实现反电动势过零点检测方式,能快速准确地检测转子位置信息,拥有非常良好的性能。而液冷智能系统控制部分采用国产32 位ARM核MCU,以GD32F450 为控制核心,读取温度信息,对水泵、风机进行智能调控,实现了合理的智能控制。
[1] 李自成,秦忆.无刷直流电机无位置传感器控制关键技术探讨研究[D].武汉:华中科技大学,2010.
[3] 廖承喜,朱志杰,翁微.无刷直流电机三段式自起动关键技术探讨研究[J].电力电子技术2008,42(5):61-62.
[4] 游志宇.基于场效应管的直流电机驱动控制电路设计[J].国外电子元器件,2008(2):3-4.
[6] 董安邦,李国丽,漆星,等.基于改进择多滤波无刷直流电机控制管理系统的研究[J].电气传动,2017,47(4).